注册后就可以查看哦!
您需要 登录 才可以下载或查看,没有账号?立即注册

x
摘要:提出了一种设计空间差别处理方法,改进了传统的设计空间移除方法会移除全局最优的弱点。首先应用昂贵点构建一个逐渐缩小的重点空间,同时将在设计空间移除方法中被删除的空间定义为其他空间,然后每次迭代都应用二阶多项式响应面(QF)同时搜索这两类空间,并分别从中选取数目不同的新的昂贵点参与QF的更新和重建。该方法采用在其他空间中选择少量新的昂贵点来代替移除空间,有效地避免了局部最优的陷阱。多个标准函数算例的验证表明,新的方法具有较高的精度和效率。将该方法应用于某款车的后车架轻量化设计中,经过优化,后车架系统的质量减小了7.67 kg,即整个系统质量减小了10.4%,且其刚度性能得到提高。与以前提出的混合自适应元模型方法相比,新方法的精度和效率都有显著提高。 关键词:设计空间差别处理;全局最优化;汽车轻量化设计;耗时问题 0 引言减少排放、节省燃料是汽车工业目前的重要课题。研究表明,每减轻10%的重量,汽车可节省燃油6%~8%[1-2],降低排放4%[3],因此,汽车轻量化设计成为汽车企业的重要研究内容。 在目前的优化方法中,基于元模型的优化方法以其计算快速的特点引起了众多学者的关注。在过去的几十年中,人们开发了很多优秀的基于元模型的全局最优化方法,如高效全局最优化方法(EGO)[4]、模式搜索采样方法(MPS)[5]等。这些方法应用单一或多个元模型进行搜索,取得了很大的成功。然而,工程师通常为实际工程中的问题定义足够大的设计空间、尽量多的设计变量来得到满意的结果,而元模型在拟合这类大规模问题时精度较差。由此,人们试图通过移除不需要的设计空间来提高算法的性能。WANG等[6]开发了自适应响应面法(ARSM),此方法可移除部分不需要的空间来提高算法的性能。但是,当样本点较少、元模型精度较差时,空间移除方法可能将全局最优一并移除而导致算法无法找到全局最优。混合自适应元模型方法(HAM)[7]采用多个元模型同时搜索,每隔两次迭代在构建的重点空间内搜索一次的方法,似乎能够解决大规模问题,然而,在HAM法中每三次迭代仅在重点空间内搜索一次,其效率仍有待提高。HAM法每隔两次迭代才使用固定数目的10个函数值最小的昂贵点构建重点空间,会导致重点空间缩小过快而降低效率和精度。ZHOU等[8]改进了HAM方法,将自移动和缩放策略应用于更新重点空间并改进搜索策略,提出了一种增强的混合自适应方法(E-HAM),取得了很好的效果。JIE等[9]提出了一种自适应元模型优化方法(AMGO),通过增加子优化问题来平衡全局和局部搜索,也取得了一定的效果。 本文提出一种设计空间差别处理方法来对实际工程中具有多变量、大设计空间的问题进行优化设计。 1 设计空间差别处理优化方法基于元模型的迭代优化方法通常起源于少量样本点构造的粗糙元模型。如果根据从这些元模型得到的信息移除部分设计空间,则全局最优也极有可能随移除的空间被一同删除。 本文提出一种设计空间差别处理(design space differentiation,DSD)方法,此方法首先利用部分昂贵点构造一个重点空间,然后采取在重点空间和其他空间内应用不同的搜索策略进行搜索的方式来代替移除空间,在整个迭代过程中不移除任何涉及空间,可有效避免设计空间移除方法会移除全局最优的弱点,其优化流程如图1所示。 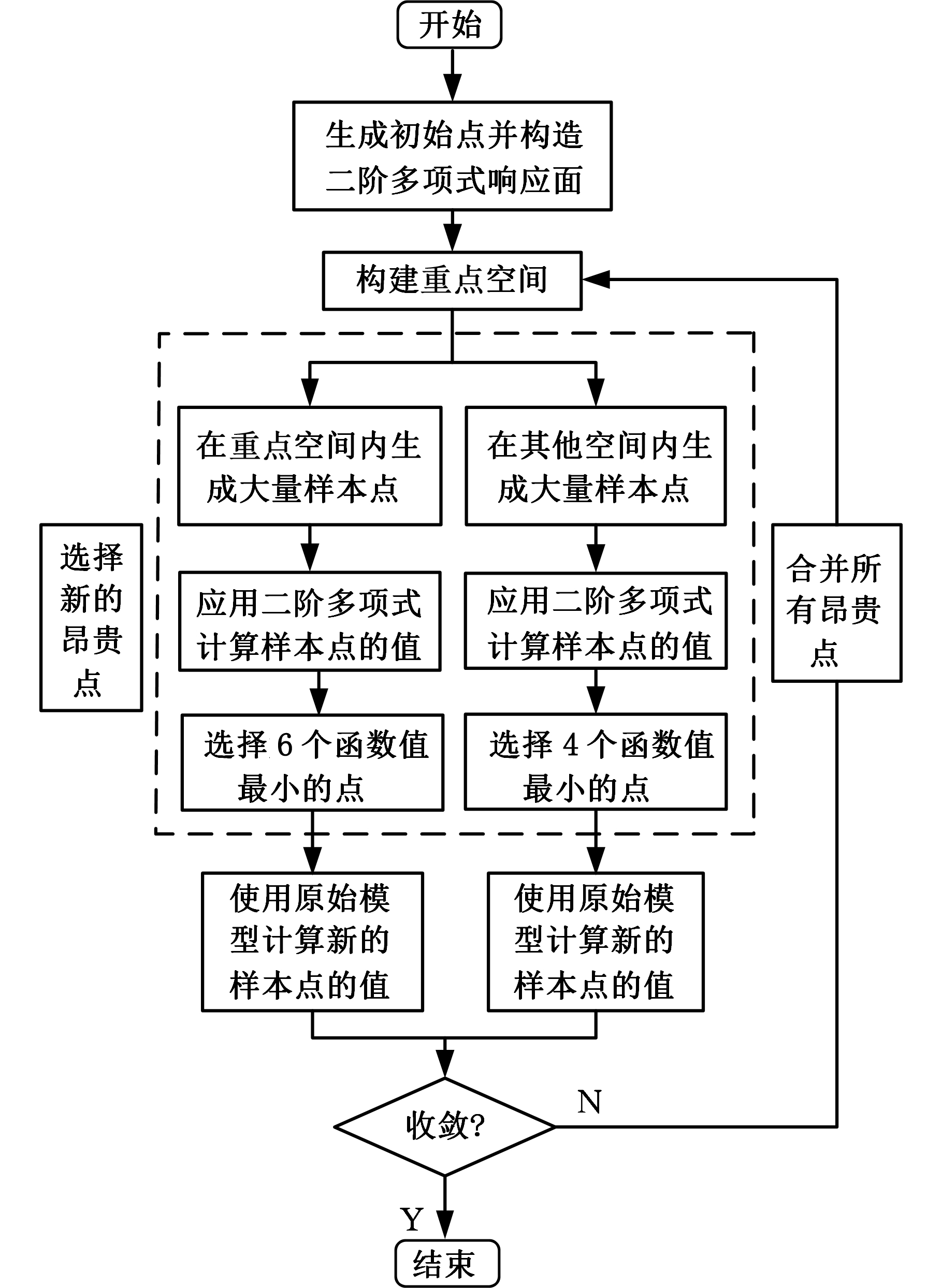 图1 优化流程
Fig.1 Procedures of the method
DSD方法主要用于解决耗时的大规模问题,其主要步骤如下。 (1)应用拉丁方设计方法生成10个初始样本点x1、x2、…、x10,计算其函数值f(x1)、f(x2)、…、f(x10),构造二阶多项式响应面。拉丁方设计是一种空间填充设计,实现简单,能够消除仿真分析中的确定性误差[10-12],而二阶多项式响应面能够准确拟合任何平滑曲面的任意局部空间[5]。经过大量的测试发现,10个初始点能够满足算法的需要,更多的初始点并不能显著提高算法的性能。 (2)构建重点空间。重点空间的构造决定了该算法的性能。初始重点空间要尽量包含足够大的空间,以保证包含全局最优,并且随着迭代的进行要逐渐缩小到全局最优附近。本文提出的DSD方法采用一定数目的具有真实解的昂贵点来构建重点空间,其数目ne随着迭代的进行不断变化,以保证得到合适的重点空间,其数目的定义如下:
(1) 其中,me是当前昂贵点的数目,wi是构建重点空间的昂贵点占当前昂贵点的比例,i为迭代次数。由于初始点以及每一次迭代所选取的昂贵点的数目都为10,根据式(1),所选择的构建重点空间的样本点的数目依次为10、18、24、28、30、30、28、24、18、10。初始样本点由拉丁方设计直接得到,能够保证初始重点空间尽可能布满整个设计空间,如图2所示。构造重点空间的样本点的数目逐渐增大然后减小,既能保证在优化前几次迭代中包含足够的空间,又能使重点空间快速缩小,图 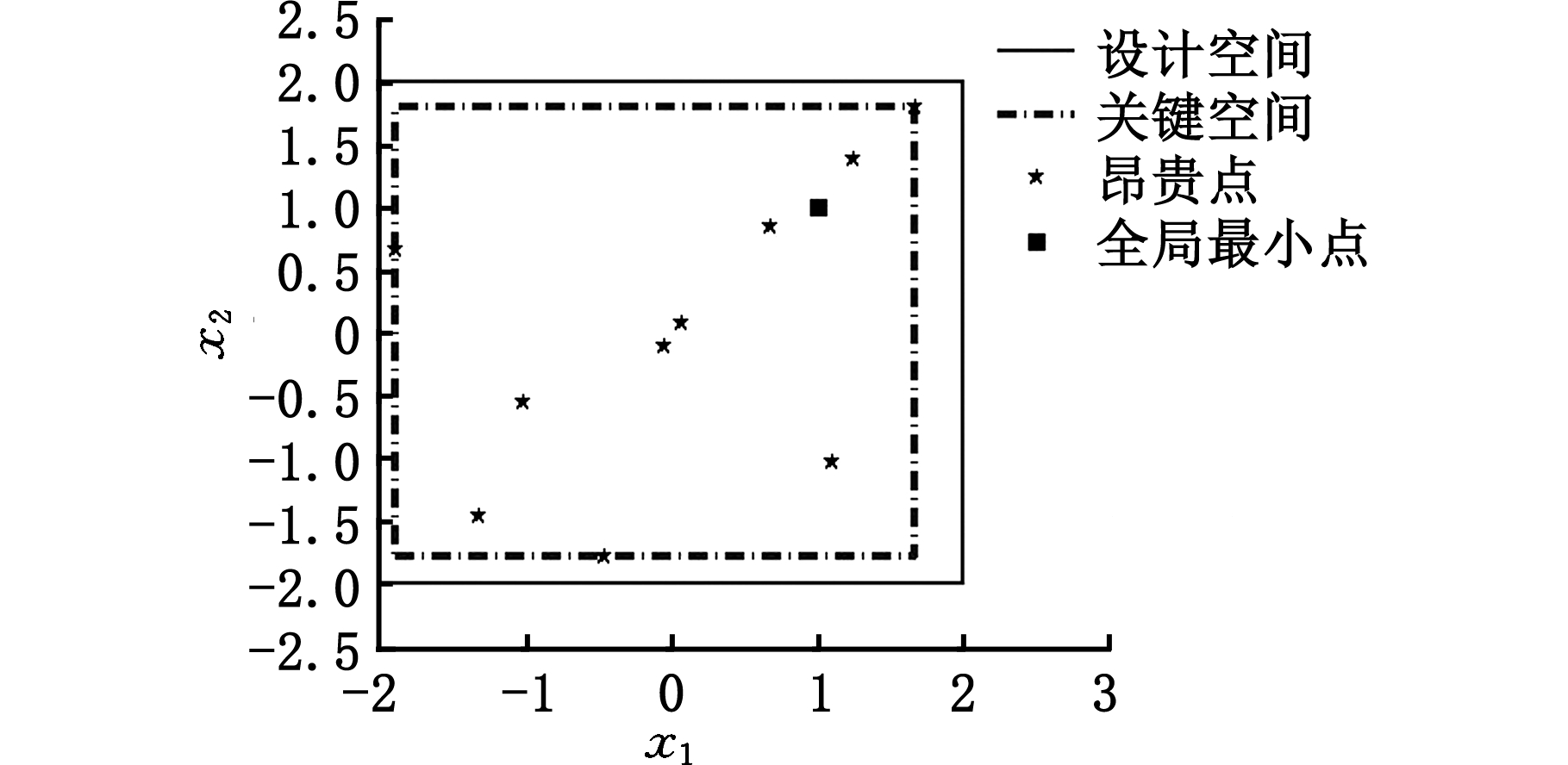 图2 某优化问题第1次迭代得到的重点空间示意图
Fig.2 The first important region in a design optimization
3所示是某优化问题第4次迭代得到的重点空间,与第1次迭代相比,重点空间包含全局最小值,而且减小明显。 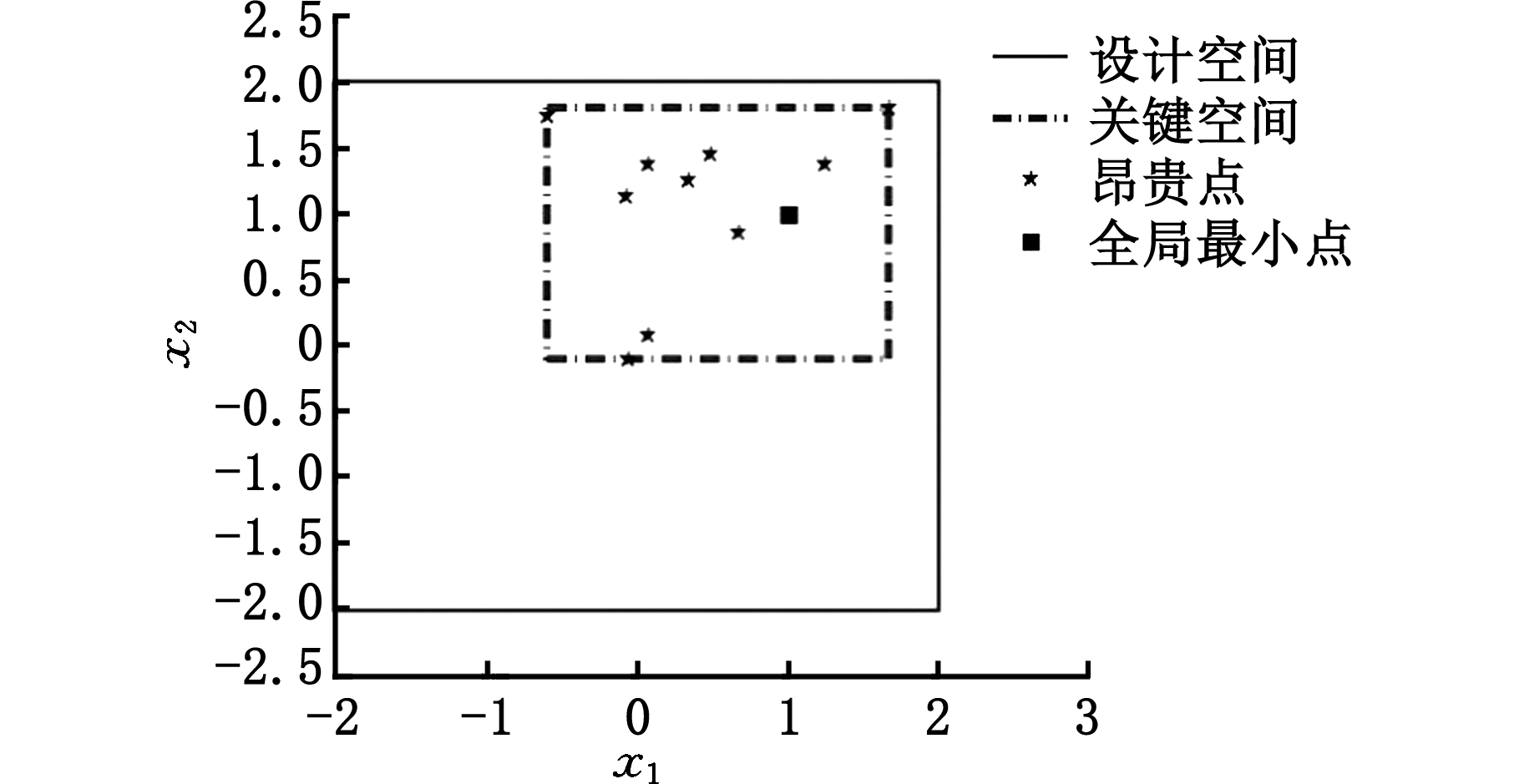 图3 某优化问题第4次迭代得到的重点空间示意图
Fig.3 The fourth important region in a design optimization
(3)分别在重点空间和其他空间内选取新的昂贵点,其策略如下: ①在重点空间内选择昂贵点。a)应用拉丁方设计在重点空间生成大量样本点(推荐为104个)[5],这些点使用元模型计算,称为廉价点;b)使用二阶多项式计算这些样本点的函数值;c)选取6个函数值最小的样本点作为新的昂贵点。 ②在其他空间内选择昂贵点。a)应用拉丁方设计在其他空间生成大量样本点(推荐为104个);b)使用二阶多项式计算这些样本点的函数值;c)选取4个函数值最小的样本点作为新的昂贵点。 (4)应用原始模型计算新的昂贵点的值并检查收敛条件。如果满足收敛条件,算法终止,否则重复步骤(2)至步骤(3)直到结束。算法采取HAM法中提出的收敛条件[7]:
(2)
式中,ε为设计者给定的一个较小的数值;fj为第j个最小的函数值。 2 算法验证本文利用4个应用广泛的标准数学函数算例对DSD方法进行验证,这4个函数分别是10个变量的Pavinai函数(PF)和Trid函数(TF),以及16个变量的F16函数和20个变量的Sum Squares函数(SSF)。 (1)Pavinai 函数(N=10):
(3) [size=1em]xi∈[2.1,9.9] (2)Trid函数(N=10):
(4) [size=1em]xi∈[-100,100] (3)F16函数(N=16):
(5) [size=1em]xi,xj∈[-5,5]
(4)Sum Squares函数(N=20):
(6) 这4个函数中PF是对数函数, F16是高阶函数,而TF和SSF是二阶多项式函数,TF具有较大的设计空间。这4个函数各具特点,能够全面地测试所提出方法的有效性,而且所得到的结果将与同类算法HAM和遗传算法(GA)进行对比(比较搜索精度和搜索效率)。优化对比结果见表1。每个函数都运算100次以避免不具代表性的结果,表中min表示算法得到的平均最小值,nit表示所用的平均迭代次数,nfe表示算法所用的昂贵点的平均数目。其中min和nit保留一位小数,nfe只保留整数部分。 从表1中可以看出,GA在优化PF和TF时精度较高,在优化F16和SSF时精度较低,最小平均迭代次数为64,调用原始模型最小平均次数为1298次。即如果每次迭代所产生的20个优化方案能够同时计算,对于优化一个单个模型计算需要1 h的问题,所用最短时间为64 h,最长为239.8 h。如果不能够同时计算,则最少需要1298 h。对于HAM,其所得结果的精度较低,在优化TF时则完全找不到最小值,在优化PF和F16时所得结果的精度也难以满足要求。DSD法在精度和效率上达到很好的平衡,能够以很高的效率得到精度 表1 数学函数优化结果(平均值)
Tab.1 Results of math functions (mean values) 
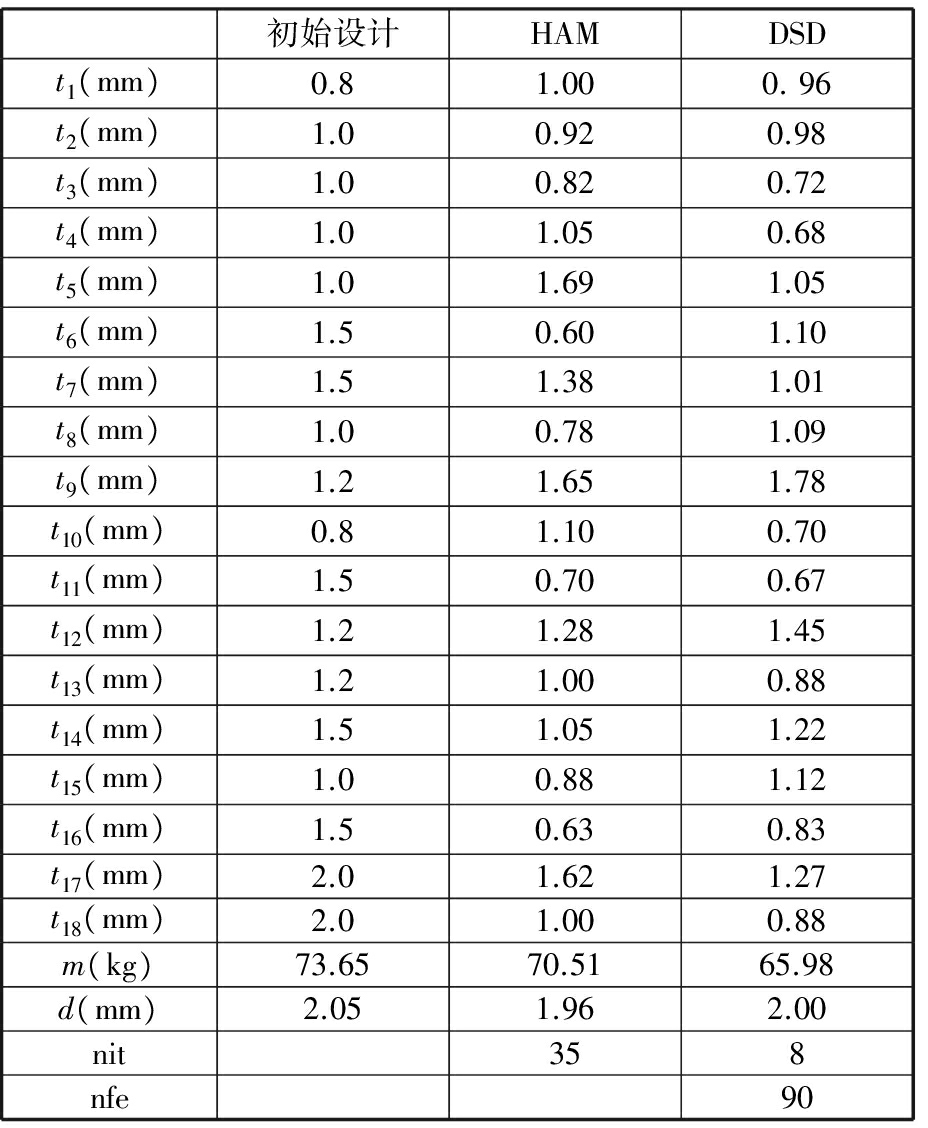
较高的结果,对于所优化的4个问题,所得到的最小值都接近各自理论最小值。如果单个模型计算时间仍为1 h,则能够同时计算每次迭代所得到的方案和每次仅能计算一个方案所需的最长时间分别为20.9 h和219 h,与GA相比,节省了80%以上的计算时间。 3 初始点数目的讨论为确定初始点的数目,DSD方法分别应用10个和30个初始点对以上4个函数进行优化,结果见表2。从表2中可以看出,初始样本点从10个增加到30个,其综合性能并没有显著变化。可见,较多的初始样本点并不能大幅度提高算法性能,因此,初始样本点的数目定为10。 4 汽车轻量化设计某款车的后车架质量为73.65 kg,在设计过程中已经进行过一次轻量化设计,为降低成本,需要对其进行进一步减重,而公司标准规定,在放置200 kg货物时所产生的最大位移d不能超过2.0 mm。优化模型为 表2 不同数目初始点所得到的结果比较
Tab.2 Comparison of the results with different number of initial points 
(7) 式中,m为整个系统的质量,kg;t1~18为选择的18个具有减重价值的部件的厚度,在优化分析中作为设计变量。 图4和图5是有限模型的加载和约束示意图。此结构的有限元模型包含43个部件、161 656个单元。 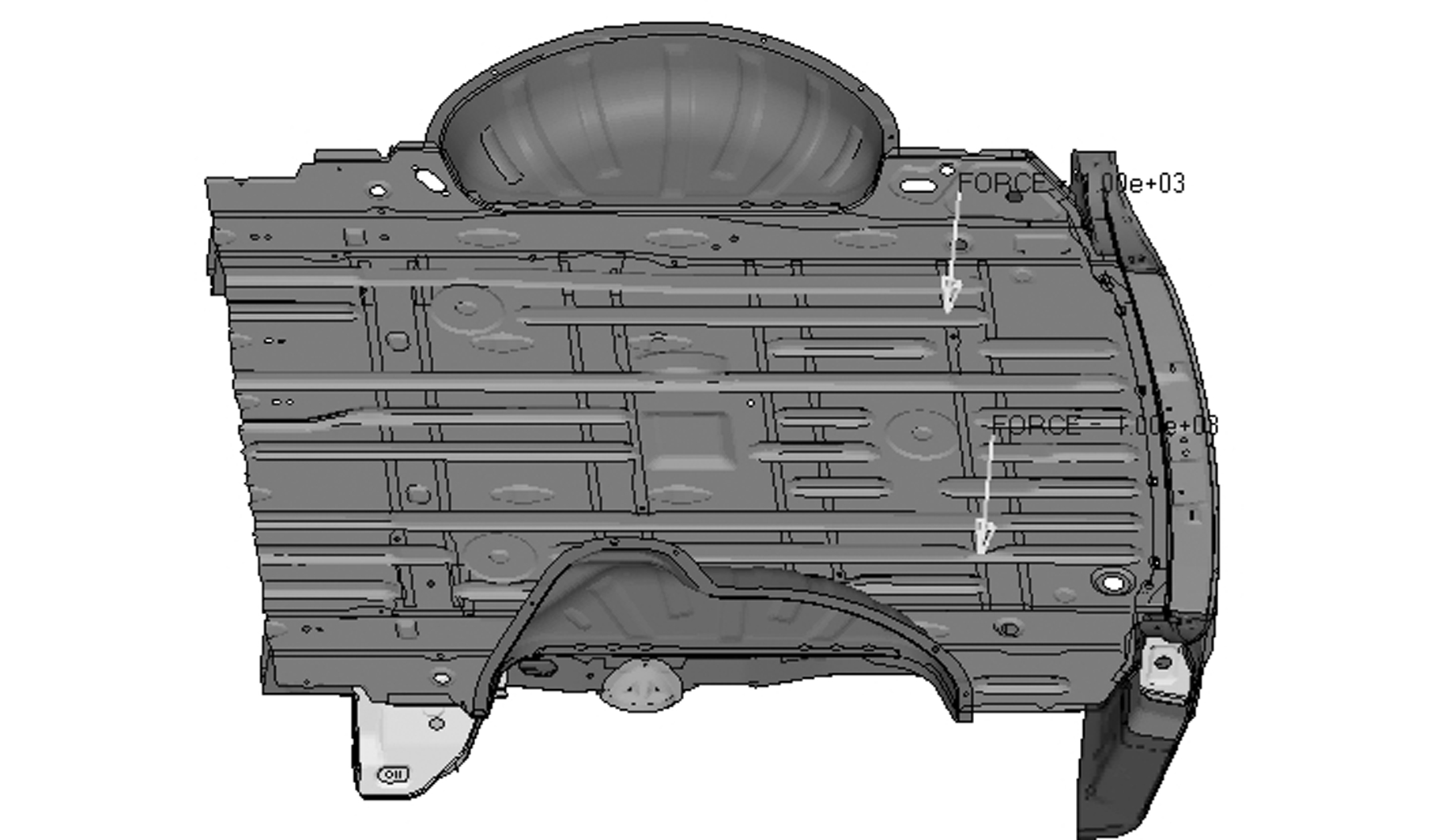 图4 某款车后车架载荷示意图
Fig.4 An illustration of the Load on the vehicle rear frame
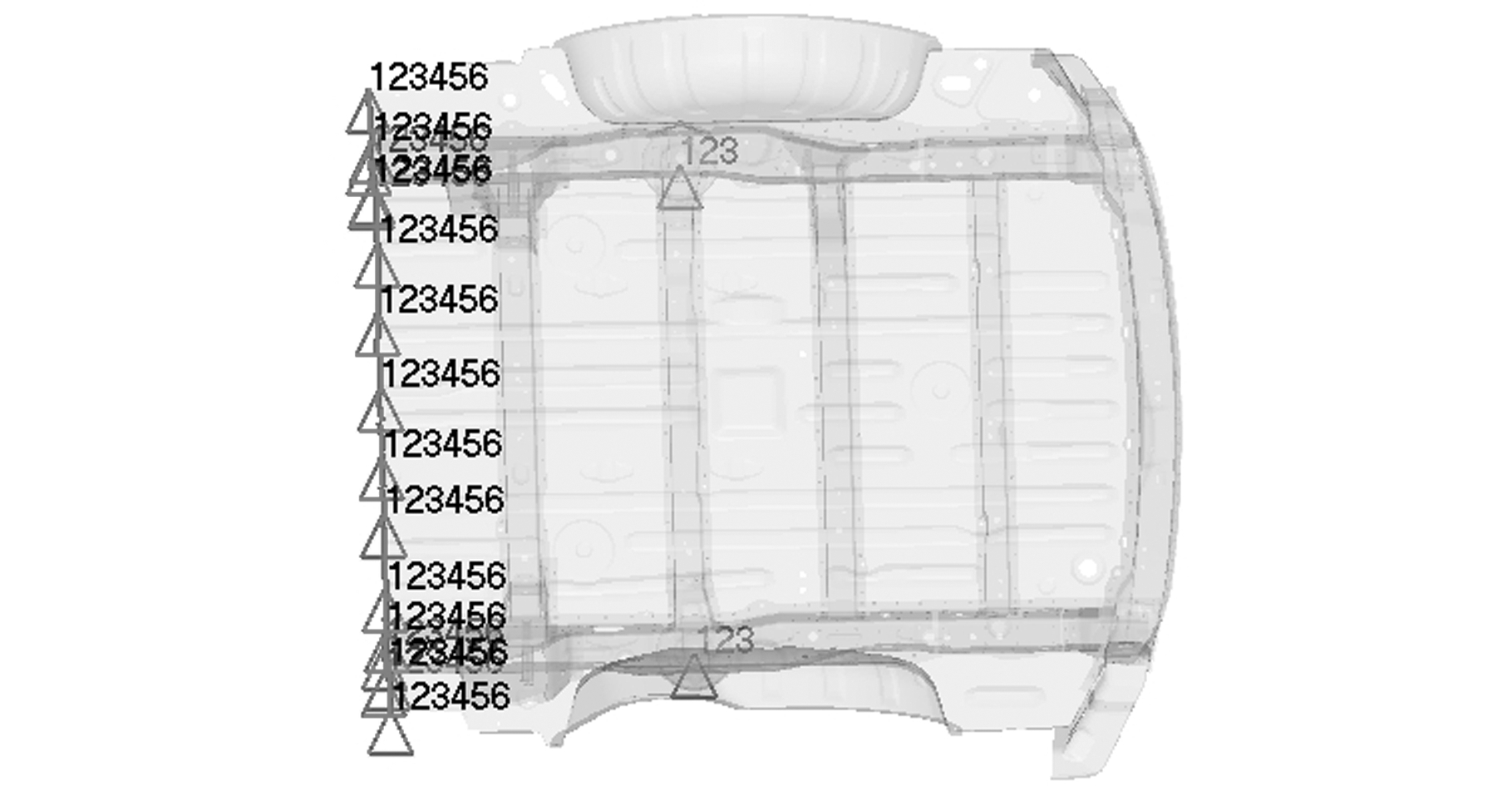 图5 某款车后车架约束示意图
Fig.5 An illustration of the constraints on the vehicle rear frame
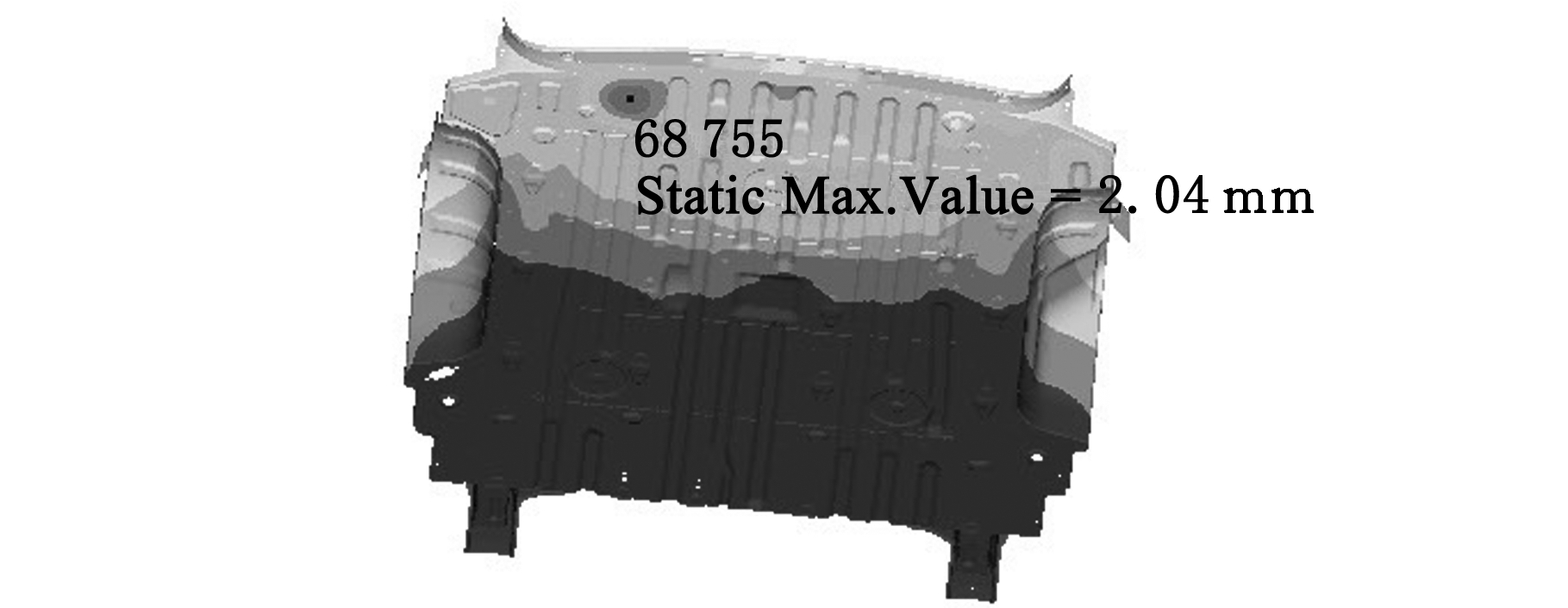
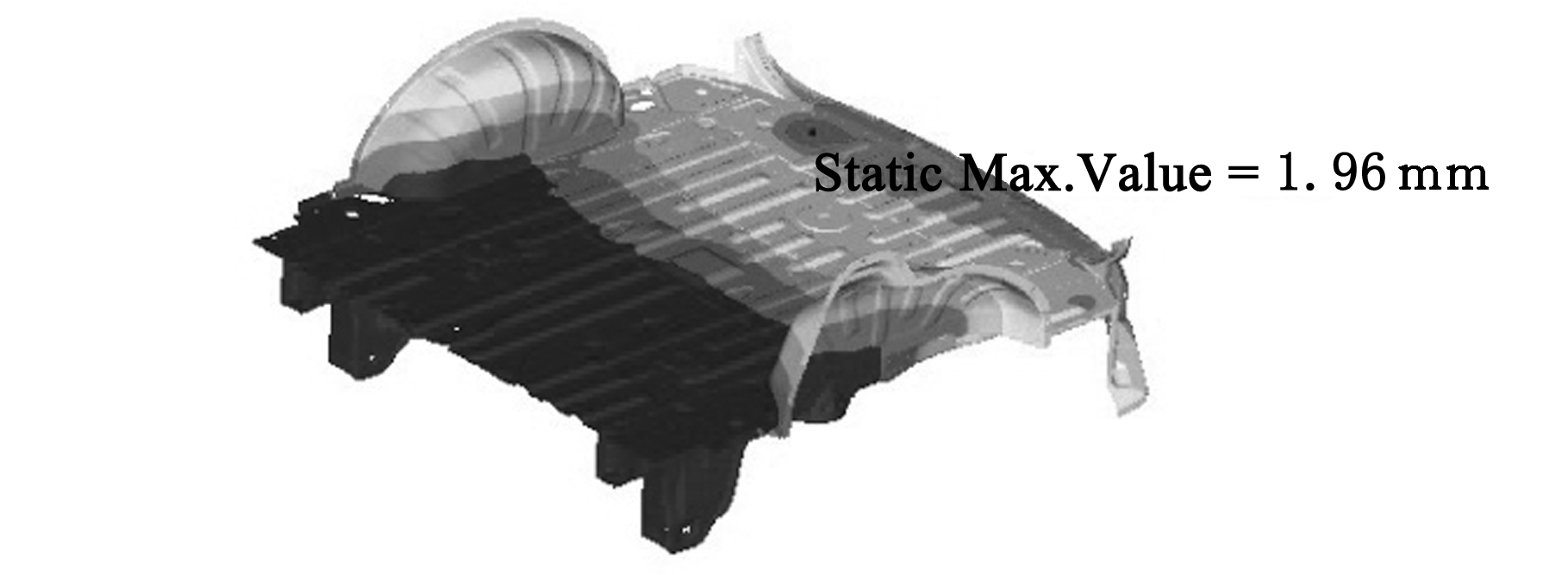
应用商业软件Nastran对该模型进行计算。该模型虽是一个线性问题,但是包含18个设计变量,具有较大设计空间,应用目前已经发布的基于元模型的优化方法计算困难,因此应用DSD方法对其进行轻量化设计。优化结果见表3。同时给出应用HAM法所得到的结果,与DSD法进行比较。表3中所有结果均保留两位小数。 从表3中可以看出,这个优化过程经过8次迭代,包括初始点在内一共需要90个昂贵点,即调用有限元模型计算90次,后车架系统的质量从73.65 kg减小到65.98 kg,减小了7.67 kg,即整个系统质量减小10.4%,施加力所产生的最大位移从2.046 mm减小到1.997 mm,系统的刚度有所增大。而HAM法应用35次迭代,调用仿真模型243次,质量减小了3.14 kg,比DSD法少4.53 kg。比较了优化前后施加力产生的最大位移,见图6。 表3 轻量化结果
Tab.3 Results of the lightweight design
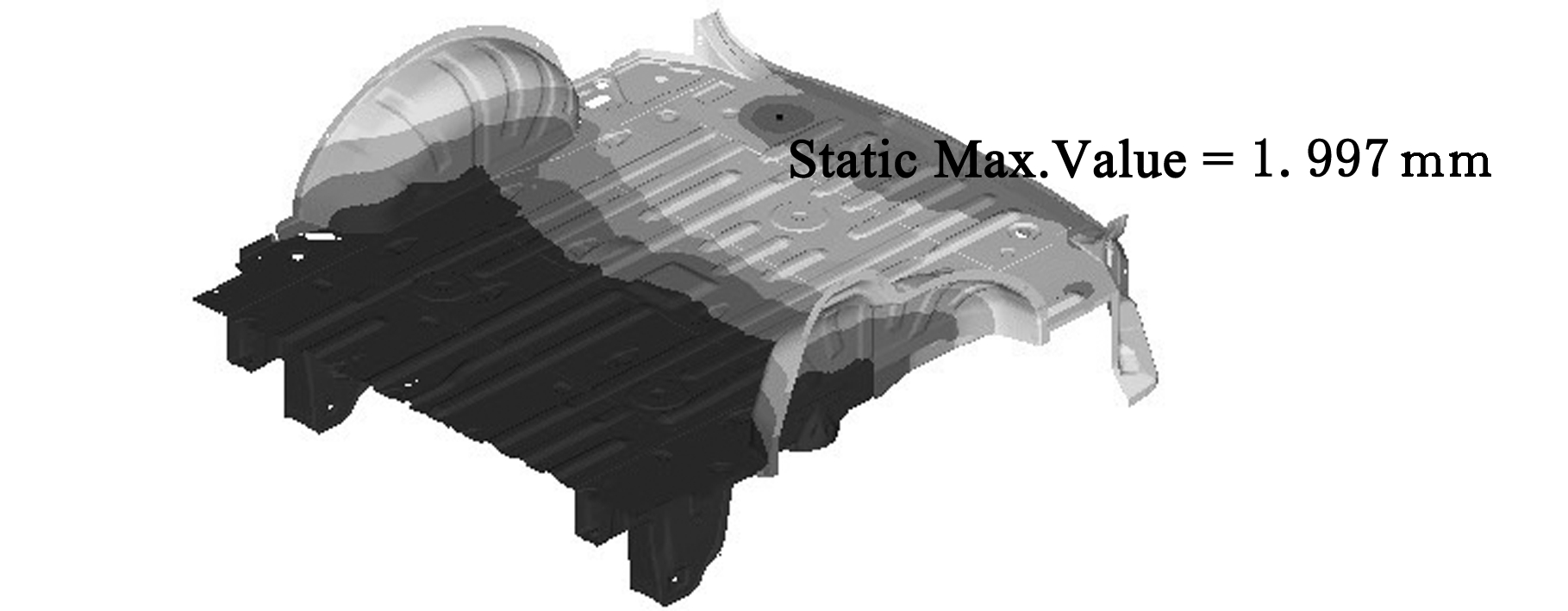 (c)DSD法结果
图6 优化前后施加力产生的最大位移比较
Fig.6 The max. displacement by the load before and after optimization
5 结论文提出一种设计空间差别处理优化方法,此方法对不同的空间采用不同的处理方式,并不移除任何设计空间,具有传统的设计空间移除方法高效的优点,同时在一定程度上避免了传统方法会移除全局最优的弱点,是传统的设计空间移除方法的改进方法。通过4个高维标准函数算例的验证以及在汽车轻量化设计中的应用,证明了算法的有效性以及在实际工程中应用的潜力。 下一阶段的工作将致力于研究基于不同元模型的设计空间差别处理方法的性能,同时研究将混合元模型策略与设计空间差别处理策略相结合,开发效率更高、应用更广泛的方法。 来源:期刊-《汽车机械工程》;作者:刘念斯、蔡永周、顾纪超、郑 颢;单位:广州汽车集团股份有限公司汽车工程研究院,广州, 511434
| 


 雷达卡
雷达卡 发表于 2019-9-16 09:05:20
发表于 2019-9-16 09:05:20
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 抢沙发
抢沙发 千斤顶
千斤顶
